Biography
I am currently Head of Digital Lab - Cyber and Security Solutions at Leonardo S.p.A.
Prior to this, I worked as Head of Cyber Electromagnetic Warfare Research at Cy4Gate S.p.A.
Before, I worked as Senior Security Researcher at Technology Innovation Institute, and as Security Researcher at Consorzio Nazionale Interuniversitario per le Telecomunicazioni.
During my Bachelor’s thesis, advised by Prof. Gennaro Boggia, I came up with a lightweight key agreement protocol for constrained IoT devices in IEEE 802.15.4e networks by adopting the Elliptic Curve Diffie Hellman protocol and the implicit certificates ECQV.
During my Master’s thesis, advised by Prof. Luigi Alfredo Grieco, I designed and implemented a security framework for Intelligent Transport Systems in Horizon 2020 BONVOYAGE project by leveraging the Attribute Based Encryption.
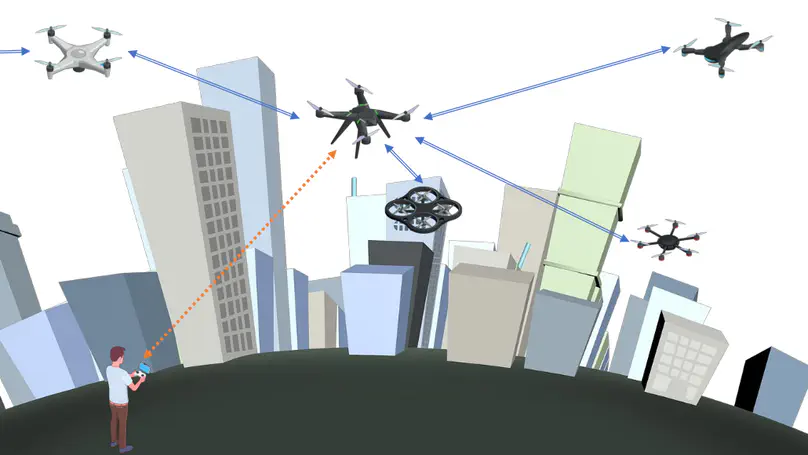
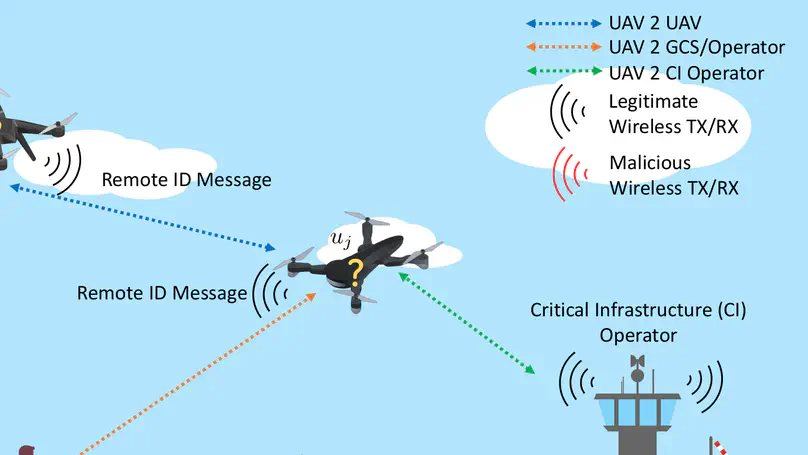
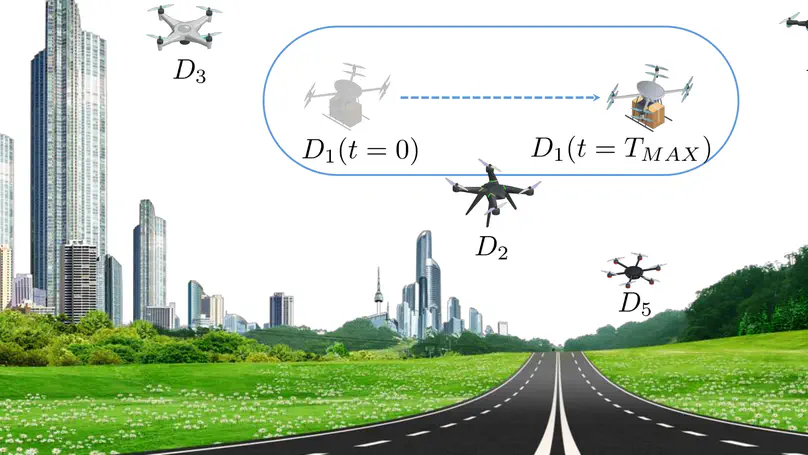
My Ph.D, advised by Prof. Roberto Di Pietro, allowed me to design and developing of (i) a dead-reckoning system that leverages the jamming signal to estimate the UAV position; (ii) a privacy-preserving, distributed, and lightweight solution for co-location detection and collision avoidance of autonomous UAVs, and (iii) an anonymous remote identification system for UAVs to allow them to broadcast RemoteID-compliant messages using ephemeral pseudonyms.
My research journey allowed me to publish 40+ scientific papers (journals and conferences), 12 proof-of-concepts, and 3 patents - 1080+ citations, h-index:18.
- Unmanned Aerial Vehicles Security
- Maritime Security
- Wireless Security
- Privacy Preserving Systems
- Applied Cryptography
- Internet of Things
- Cyber-Physical Systems Security
Ph.D in Computer Science and Engineering, 2021
Hamad Bin Khalifa University, Doha, Qatar
MSc in Computer Science and Engineering (cum laude), 2017
Politecnico di Bari, Bari, Italy
BSc in Computer Science, and Automation Engineering, 2014
Politecnico di Bari, Bari, Italy
Skills
Experience
Latest News
Featured Publications

Publications
Patents
Licenses and Certifications
- Advanced Remotely Piloted Aircraft System, Sanad Academy
- Cryptography I, Coursera
- Introduction to cybersecurity I, Cisco Networking Academy
- End-User: Social Engineering, Cybrary
- Cisco CCNA Networking for Home and Small Businesses, Cisco
- Microsoft IC3 (Internet and Computing Core Certification) - Computing Fundamentals - Key Applications - Living Online - Database Applications, Microsoft
Academic Services
Invited Speaker
- Politecnico di Bari - Seminar 2025 - Hack Is in the Air: Breaking Boundaries of Wireless Communications
- Commissione Automazione e Domotica dell’Ordine degli Ingegneri di Roma 2024 - Industrial IoT: Security and Privacy in IT/OT Integration
- ITASEC ‘23: Security and Privacy Issues in the Age of Drones
- Apulia CyberSecurity Forum 2022
Journal Editor
- Guest Associate Editor in Security, Privacy and Authentication. Frontiers in Communications and Networks Security, Privacy and Authentication - Security and Privacy for Underwater, Aerial and Ground Vehicles
General Chair
- 1st Workshop on Security and Privacy of Mobile IoT (SP-MIoT) in conj. with ESORICS 2022
Technical (Program) Committee
- 8th International Workshop on Wireless Sensors & Drones in IoT Conference Wi-DroIT 2026
- IEEE 22nd Annual International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT 2026)
- IEEE European Symposium on Security and Privacy (IEEE Euro S&P) 2026
- International Conference on Information Systems Security and Privacy (ICISSP) 2026
- IEEE 9th Cyber Security in Networking Conference (CSNet 2025)
- IEEE Annual Congress on Artificial Intelligence of Things (IEEE AIoT) 2025
- EAI SecureComm 2025
- 7th International Workshop on Wireless Sensors & Drones in IoT Conference Wi-DroIT 2025
- International Conference on Computer Communications and Networks 2025
- IEEE 21st Annual International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT 2025)
- 34th International Conference on Computer Communications and Networks (ICCCN 2025)
- 18th International Conference on Network and System Security (NSS 2024)
- IEEE Journal on Selected Areas in Communications (JSAC) - Special Issue on Zero Trust for Next-Generation Networking 2024
- EAI SecureComm 2024
- 3rd Workshop on Security and Privacy in Connected Embedded Systems (SPICES 2024) Co-located with EWSN 2024
- 6th International Workshop on Wireless Sensors and Drones in Internet of Things 2024 (Wi-DroIT 2024, co-located with DCOSS 2024)
- IEEE Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT) 2024
- Annual Computer Security Applications Conference Artifacts Evaluation (ACSAC AE) 2023
- European Symposium on Research in Computer Security (ESORICS) 2023
- IEEE GlobeCom 2023 Workshop - CelUAVSatCom
- 2nd Workshop on Security and Privacy in Connected Embedded Systems (SPICES) in conj. with EWSN 2023
- 5th International Workshop on Wireless Sensors and Drones in Internet of Things 2023 (Wi-DroIT 2023)
- International Conference on Mobility, Sensing and Networking (MSN 2022)
- Unconventional Security for Wireless Communications (USWC) in conj. with EWSN 22
- SECRYPT 2022
- ICT for Rural Development (IC-ICTRuDev) 2021
- Wireless Days 2021 - 12th Wireless Days Conference
Reviewer
- 8th International Workshop on Wireless Sensors & Drones in IoT Conference Wi-DroIT 2026
- IEEE 22nd Annual International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT 2026)
- IEEE European Symposium on Security and Privacy (IEEE Euro S&P) 2026
- International Conference on Information Systems Security and Privacy (ICISSP) 2026
- IEEE 9th Cyber Security in Networking Conference (CSNet 2025)
- IEEE Annual Congress on Artificial Intelligence of Things (IEEE AIoT) 2025
- EAI SecureComm 2025
- 7th International Workshop on Wireless Sensors & Drones in IoT Conference Wi-DroIT 2025
- International Conference on Computer Communications and Networks 2025
- IEEE 21st Annual International Conference on Distributed Computing in Smart Systems and the Internet of Things (DCOSS-IoT 2025)
- 34th International Conference on Computer Communications and Networks (ICCCN 2025)
- 18th International Conference on Network and System Security (NSS 2024)
- IEEE Journal on Selected Areas in Communications (JSAC) - Special Issue on Zero Trust for Next-Generation Networking 2024
- EAI SecureComm 2024
- IEEE International Conference on Computer Communications (INFOCOM) 2024
- IEEE Wireless Communications and Networking Conference (WCNC) 2024
- Annual Computer Security Applications Conference (ACSAC) 2023
- European Symposium on Research in Computer Security (ESORICS) 2023
- IEEE Transactions on Dependable and Secure Computing
- IEEE Transactions on Mobile Computing
- IEEE Transactions on Wireless Communications
- IEEE Transactions on Aerospace and Electronic Systems
- IEEE Communications Magazine
- IEEE Internet of Things Journal
- IEEE Access
- IEEE International Conference on Intelligent Robots and Systems (IROS)
- IEEE International Conference on Computer Communication (INFOCOM)
- IEEE International Conference on Communications (ICC)
- ACM Conference on Security and Privacy in Wireless and Mobile Networks (WISEC)
- European Symposium on Research in Computer Security (ESORICS) 2022
- Transactions on Emerging Telecommunications Technologies
- Elsevier Computer Communications (COMCOM)
- Elsevier Computer Networks (COMNET)
- Elsevier Pervasive and Mobile Computing
- Elsevier Vehicular Communications
- Pervasive and Mobile Computing
- International Journal of Information Security
- Journal of Computer Security
- IET Information Security
- Security and Communication Networks
Mentor for more than 20 Master and Bachelor students worldwide